
ardupilot学习笔记
整合命令
python /opt/ardupilot/Tools/autotest/sim_vehicle.py --location=AVC_plane -v ArduCopter --console --map
查找python位置
1 | whereis python |
删除软链接
1 | rm /usr/bin/python |
生成python3的软链接到环境变量
1 | ln -s /usr/bin/python3.6 /usr/bin/python |
pip下载慢
1 | -i https://pypi.tuna.tsinghua.edu.cn/simple |
打开cygwin输入
cd ~/ardupilot/ArduCopter
../Tools/autotest/sim_vehicle.py –map –console (默认master下版本arducopter,默认模拟 四轴)
启动SITL后输入
mode guided
arm throttle
takeoff 40 (起飞命令:起飞必须在布防后15秒内开始)
改变飞行器参数,可以在出现的MAVProxy.exe窗口里输入:
param load ..\Tools\autotest\default_params\copter.parm
(在cygwin里输入sim_vehicle.py -w可以将参数恢复成默认值)
要加入10m/s的南风,可以在出现的MAVProxy.exe窗口里输入:
param set SIM_WIND_DIR 180
param set SIM_WIND_SPD 10
更改飞行模式,可以在出现的MAVProxy.exe窗口里输入: mode modename
如: mode rtl / mode auto / mode stabilize / mode land /mode guided
如果想使用其他版本固件,比如3.6.10,在cygwin输入
cd ardupilot
git fetch origin Copter-3.6.10: Copter-3.6.10
git checkout Copter-3.6.10
如果想仿真其他框架,比如直升机,在cygwin输入
cd ~/ardupilot/ArduCopter
../Tools/autotest/sim_vehicle.py –frame heli –map –console
很有用的命令 –help
定义不稳定的飞行状态
飞行冻结
偏差
坠机
潜在的推力损失
不正确的配置处理
关于ardupilot的参数
知行合一ArduPilot | ArduPilot控制器框架简述与PID参数整定 - 知乎 (zhihu.com)
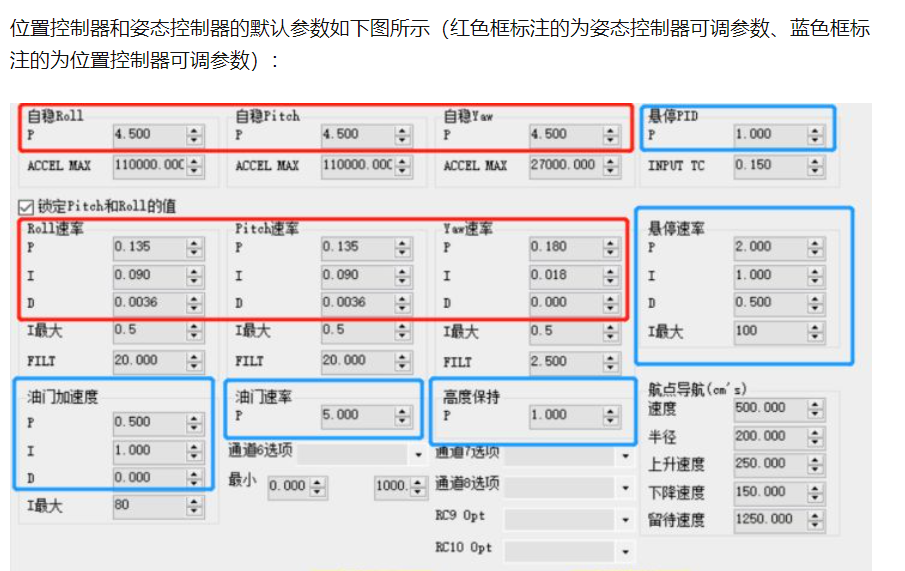
位置控制器和姿态控制器默认参数
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 j52nnw9的博客!



